Challenge: Our customer in the Medical Device Industry needed to mitigate quality risks due to operator handling, reduce labor costs, and replace subjective operator inspections with automated vision inspections.
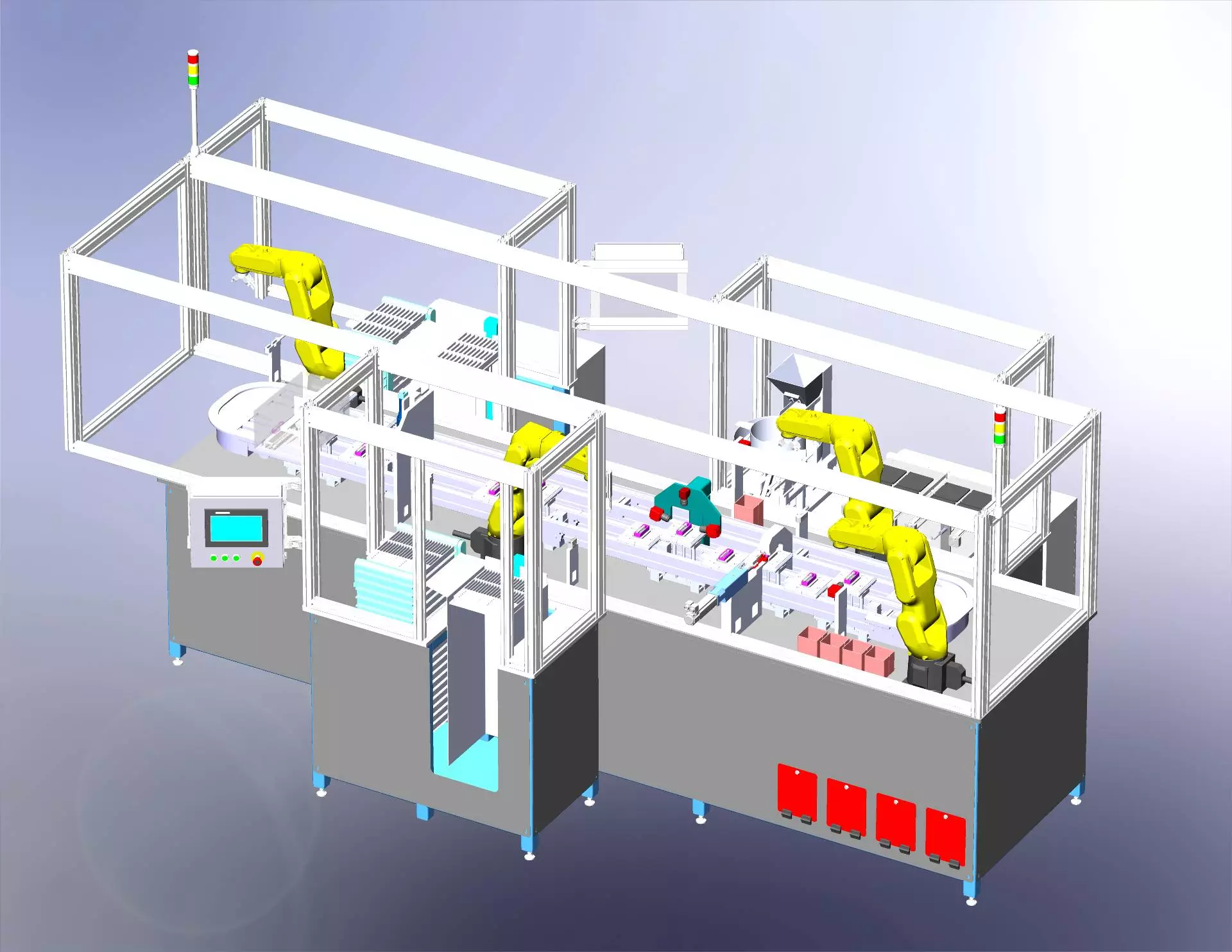
Solution: ACA designed a fully automated assembly and inspection system for a surgical instrument. The parts move through the machine from station to station using a recirculating pallet conveyor. An RFID chip in each pallet and an RFID reader at each station tracks parts as they travel through the system. Parts are fed into the system automatically using bowl feeders, drawers, and tray handlers. If a reject occurs at any station, the parts are automatically sorted by their reject type into locked reject bins.
Station 1: A 6-axis robot loads a part to the pallet from a neighboring system. The robot then loads a new part from the tray handler to the neighboring system pallet.
Station 2: The pallet is lifted and sealed into a cleaning chamber and where air nozzles and a vacuum system cleans the part.
Station 3: A vision system inspects the part for debris.
Station 4: A vision guidance system locates a sheet metal cover in the vacuum formed tray at the tray handler. A 6-axis robot picks a sheet metal cover and installs it onto the part.
Station 5: A vision system inspects the sheet metal cover in several locations to verify that it has latched correctly.
Station 6: A 6-axis robot with dual end effectors picks parts from a bowl feeder and a drawer, presents them to a camera for inspection, and assembles them together. The robot then places the subassembly to the pallet where a servo controlled press assembles the parts. The servo press monitors force and distance during the cycle to verify the assembly is successful.
Station 7: A vision system inspects the part for damage and a 6-axis robot unloads the part to a neighboring system. If the part has been rejected at any point in the process, the robot sorts the part into the proper reject chute.
{kind=link}